
Braingeneer group publication explores neurological control of flexible robots
Wednesday, October 21, 2020 | James McGirk
Tebyani and Spaeth’s robot
Controlling a robot’s movement typically requires laborious programming. A team of UC Santa Cruz researchers in the Braingeneers group are applying a different approach, using a sophisticated simulation of a biological system to control a flexible robot.
The results have been published in the October 21st, 2020 issue of Plos One.
“This is a great example of the interdisciplinary research done at UC Santa Cruz,” co-author Maryam Tebyani, computer engineering Ph.D. student said. “It’s a combination of robotics and neuroscience.”
“What we’re trying to do,” said first author Alex Spaeth, Ph.D. student in computer engineering, “is to take a simulation of the computational activity of neural cells (a network of cells capable of learning and adapting) and attach it to a hand designed system.”
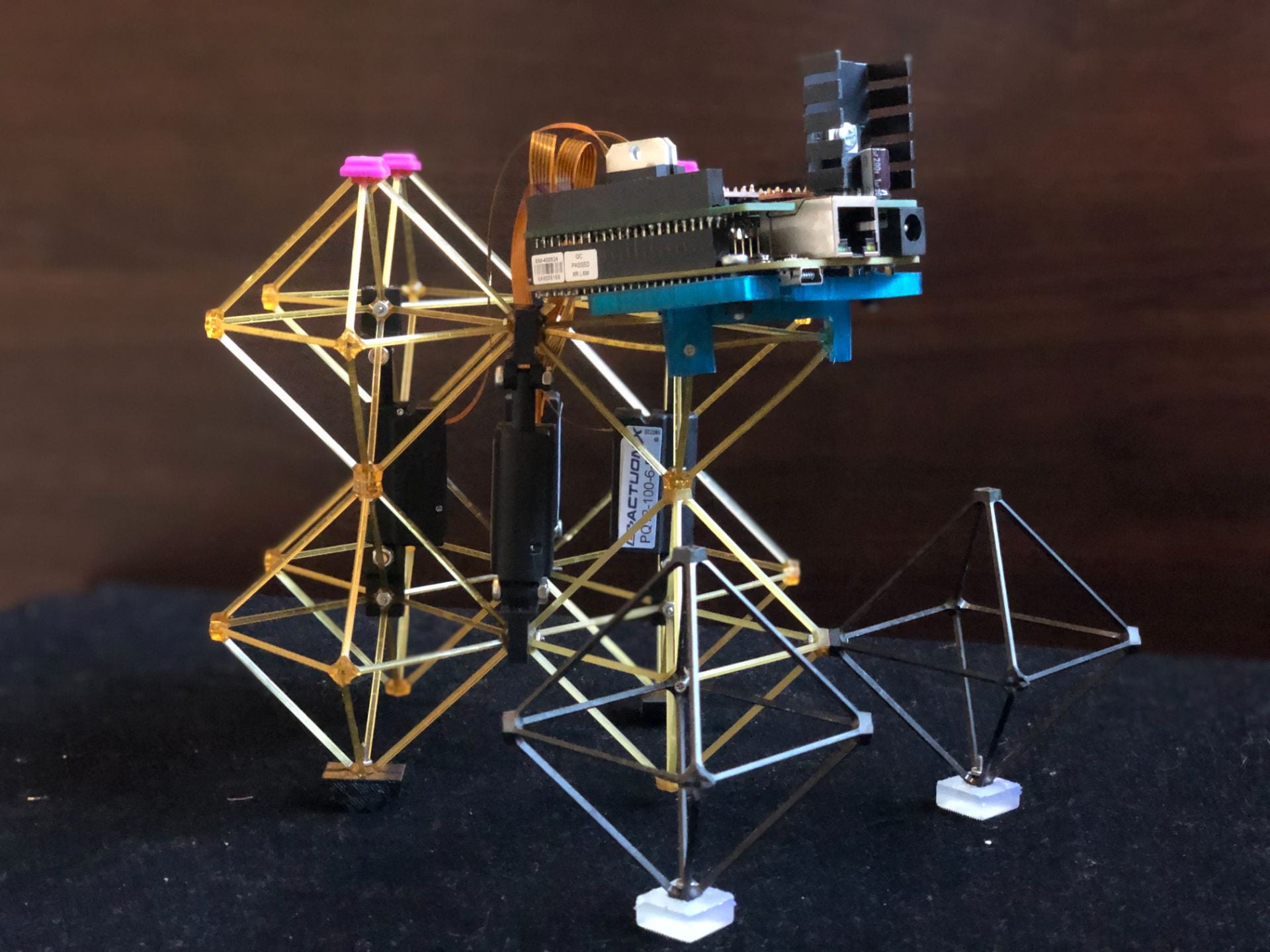
Alternate view of the robot
The paper, “Spiking neural state machine for frequency entrainment in a flexible modular robot,” describes how the dynamics of spiking neurons can be used to build computational modules that are wired together to create neural state machines, which is used for closed-loop control of a flexible robot.
The technology relies on “neuromorphic computation,” biologically inspired computational units which communicate using “spikes” (akin to neurons firing in the human brain). Networks of spiking computational units can be created using self-training neural networks. Spaeth and Tebyani took a biologically inspired spiking network and are using this technology to control a flexible robotic system.
Recent Comments